LoPy4 - TTN Lora - Uplink OK - Downlink not working
-
Hi from Australia,
Project --> IoT with LoRaWAN, Pycom, The Things Network & Node-RED
https://core-electronics.com.au/tutorials/iot-with-lorawan-pycom-the-things-network-and-node-red.htmlLorawan gateway at home --> Sentrius Gateway
Device --> LoPy4 + PyTrack
Firmware version --> 1.20.2.rc3I searched on different forum on the different ways to join in OTAA mode in adding the Australian channels and most of the configurations were working.
Basically I can join the gateway
I can send data from the LoPy, it is received by the Application and I can received it in Node-RED.
So far, so good.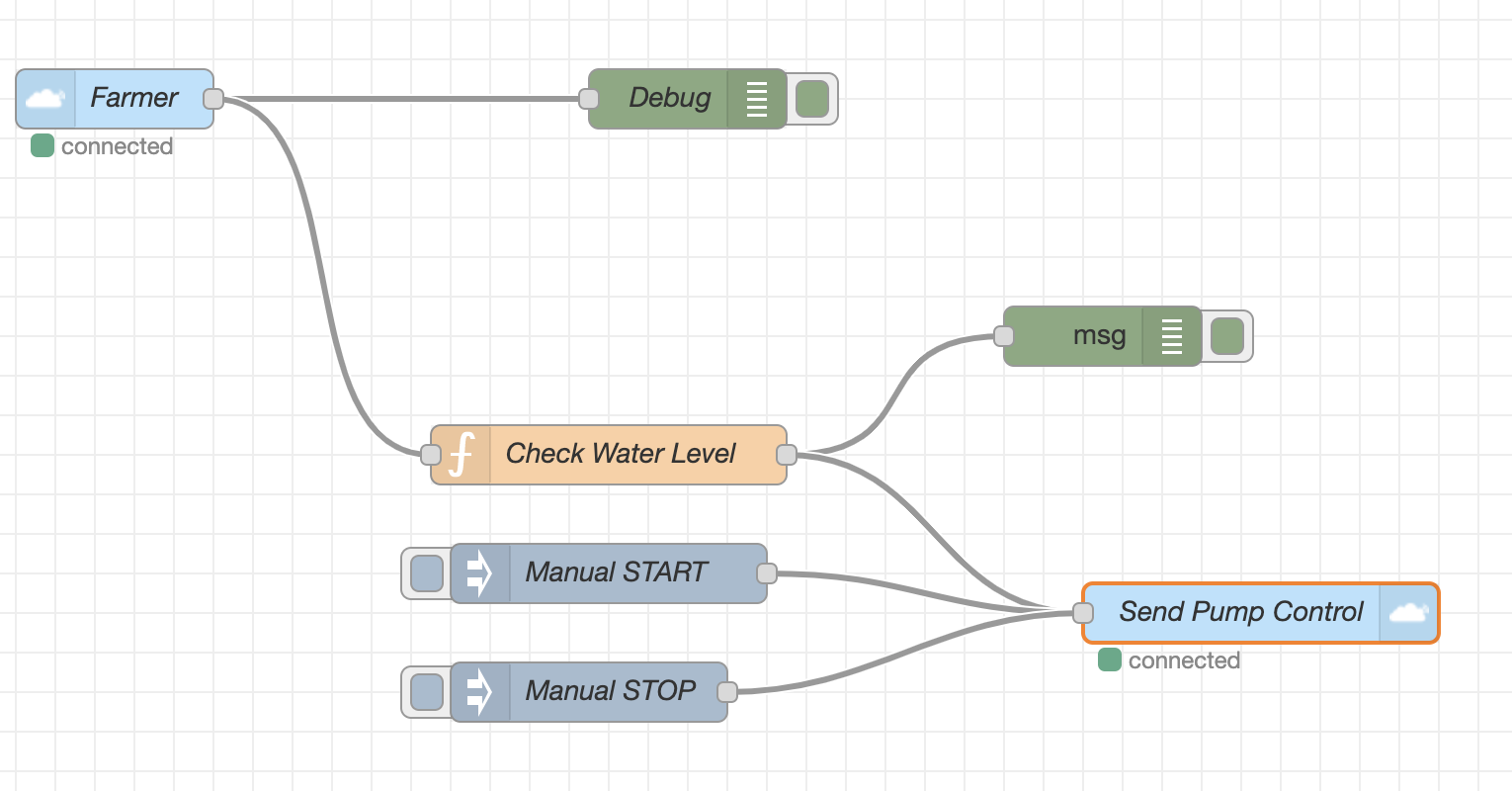
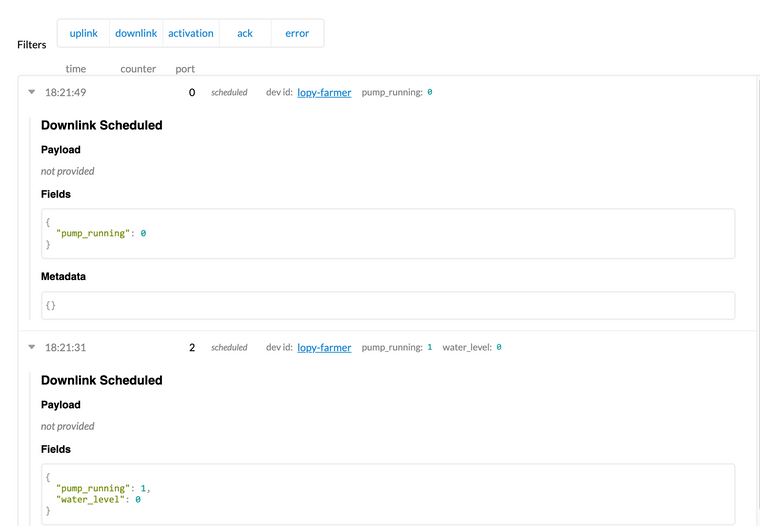
Data received from the LoPy - Application Traffic
The LoPy is sending "water_level: 0"
and in response, Node-RED is transmitting --> "pump_running: 1"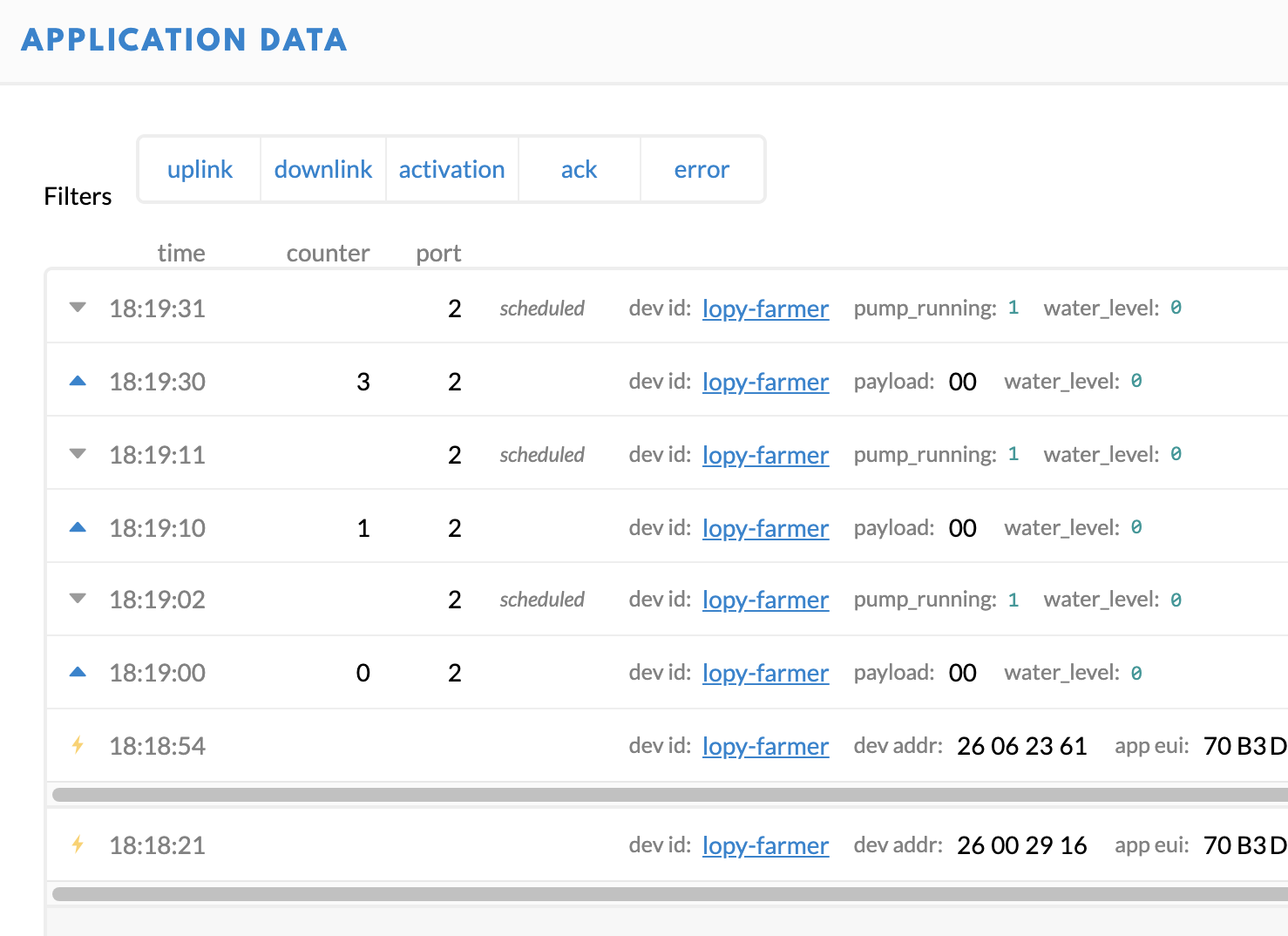
Data received from the LoPy - Gateway Traffic
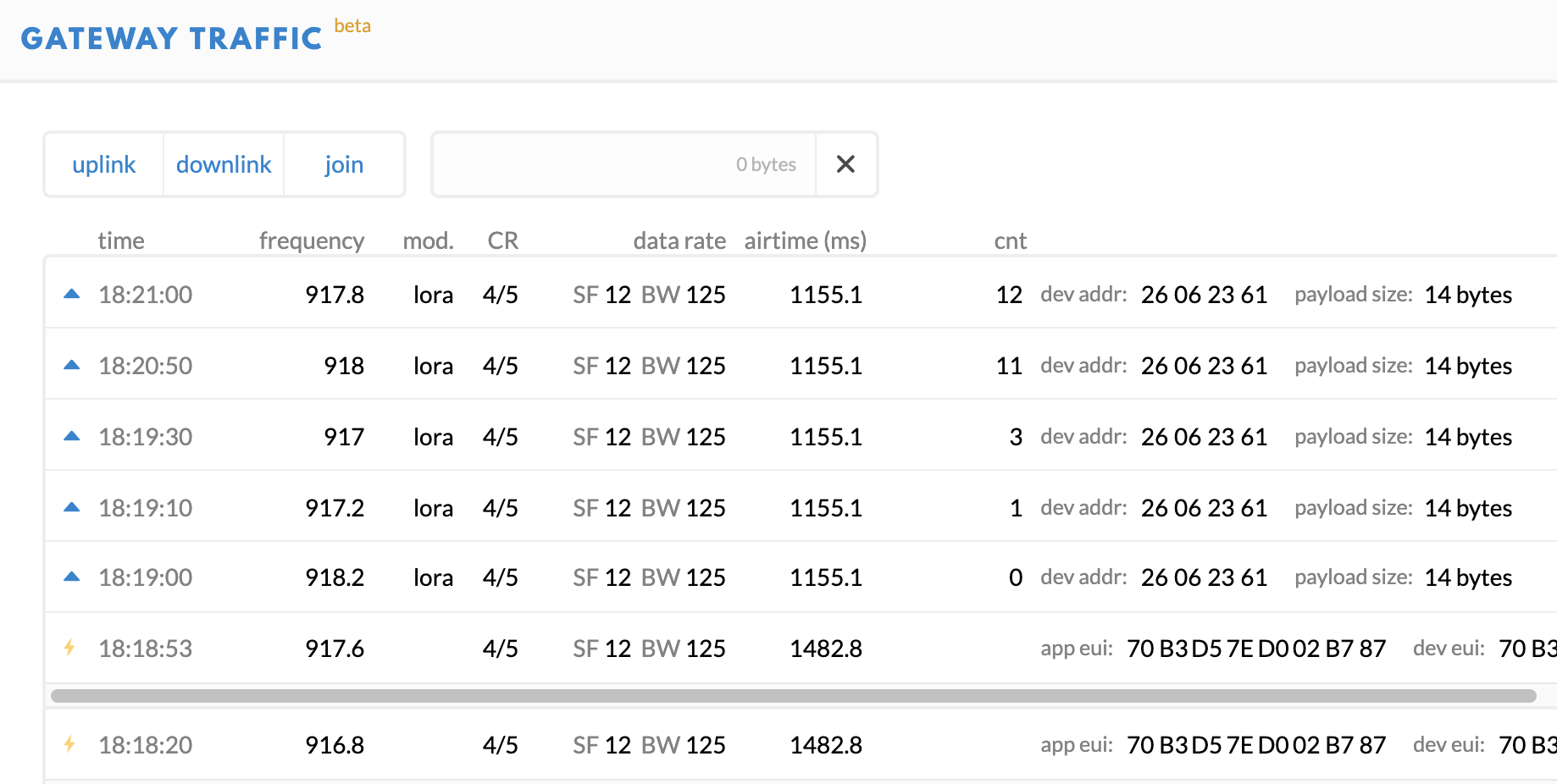
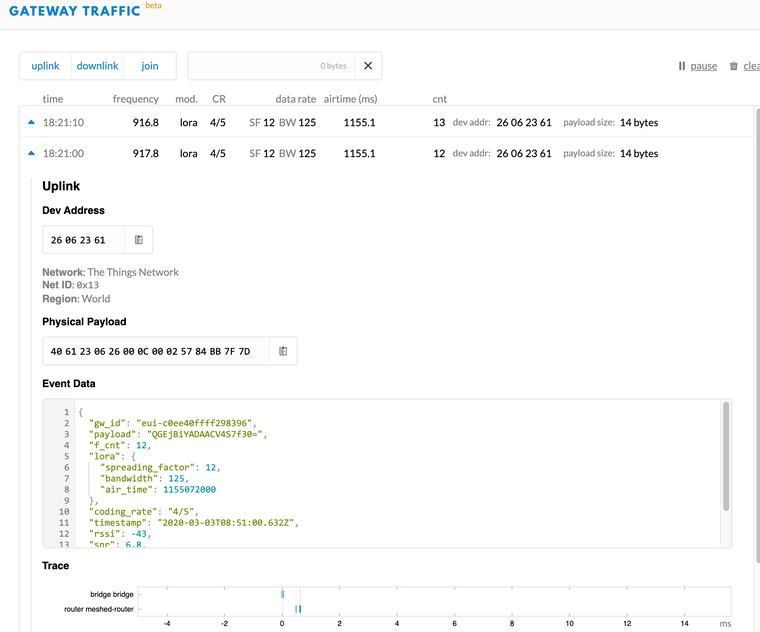
The Application receives the data sent by Node-RED but the LoPy doesn't received it from the gateway.
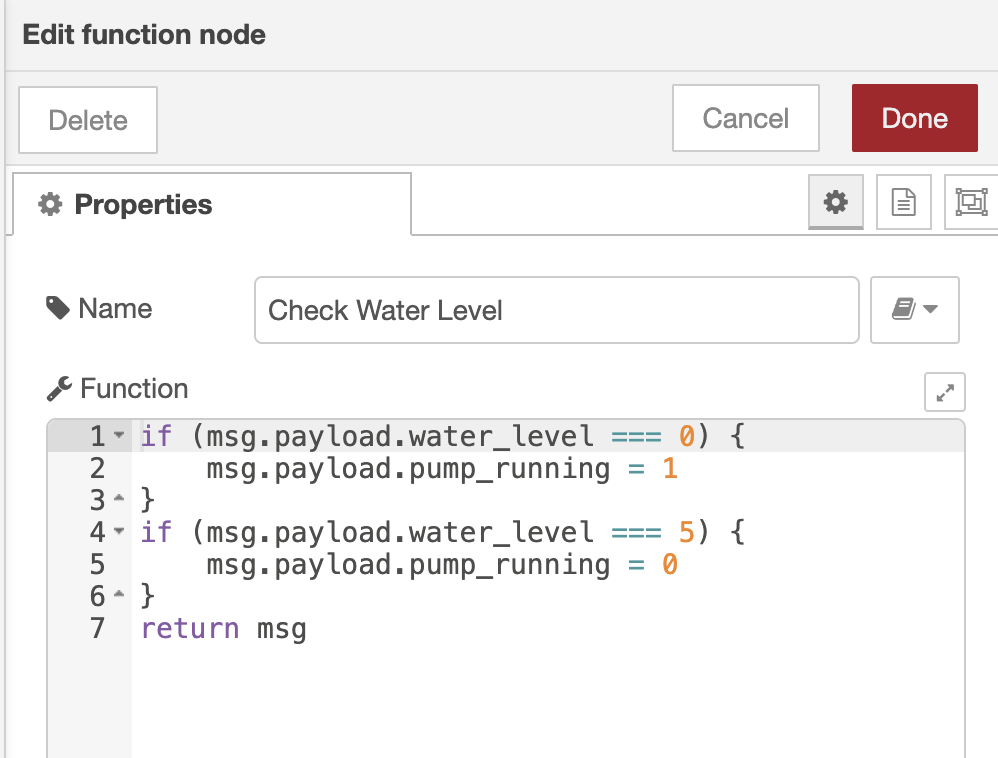
I tried different ports but no luck.The Node-RED code is pretty simple:
I don't know if this is a problem with how I join the network? (Channels created, ...)
or maybe the is something in the LoPy code that is not correctWould anyone have an idea of what am I doing wrong?
Could it be that the JSON sent from node-RED is not correct?
See --> linkI looked there without any luck:
--> link
--> link
--> link
--> link
--> linkCould this be that
Thank you for your help.
Xavier
CODE LOPY4
from network import LoRa import struct import socket import pycom import time import binascii import utime LORA_FREQUENCY = 916800000 LORA_GW_DR = "SF7BW125" # DR_5 LORA_NODE_DR = 5 COLOUR_WHITE = 0xFFFFFF COLOUR_BLACK = 0x000000 COLOUR_RED = 0xFF0000 COLOUR_GREEN = 0x00FF00 COLOUR_BLUE = 0x0000FF pycom.heartbeat(False) pycom.rgbled(COLOUR_BLACK) print("****** Farmer App OTAA *******") # lora config lora = LoRa(mode=LoRa.LORAWAN, region=LoRa.AU915) # access info from ttn console (note; we just need the app id & app key) dev_eui = binascii.unhexlify('WWWWWWWWWWWW') # these settings can be found from TTN app_eui = binascii.unhexlify('ZZZZZZZZZZZZZZZZZ') app_key = binascii.unhexlify('XXXXXXXXXXXXXXXXXXXXXXXXXXXX') for i in range(0, 72): lora.remove_channel(i) # adding the Australian channels print("add channels") for i in range(8, 16): lora.add_channel(i, frequency=915200000 + i * 200000, dr_min=0, dr_max=3) lora.add_channel(65, frequency=917500000, dr_min=4, dr_max=4) for i in range(0, 8): lora.add_channel(i, frequency=923300000 + i * 600000, dr_min=0, dr_max=3) # attempt join - continues attempts background every 15 seconds lora.join(activation=LoRa.OTAA, auth=(dev_eui, app_eui, app_key), timeout=0) # wait for a connection to be established print('Waiting for LoRaWAN network connection...') while not lora.has_joined(): utime.sleep(1) if utime.time() > 15: print("possible timeout or collision") machine.reset() pass print('Network joined!') s = socket.socket(socket.AF_LORA, socket.SOCK_RAW) s.setsockopt(socket.SOL_LORA, socket.SO_DR, LORA_NODE_DR) s.setblocking(False) pump_running = False water_level = 0 empty_level = 0 full_level = 5 def check_downlink_messages(): global pump_running # We need to tell Python to use the variable # defined outside this function downlink_message, port = s.recvfrom(256) # See if a downlink message arrived #print(downlink_message) #print(port) if not downlink_message: # If there was no message, get out now return print("Downlink message received!") if downlink_message[0]: # The first byte is non-zero print("Starting the pump") pump_running = True else: print("Stopping the pump") pump_running = False def send_level(): print('Sending water level: {}'.format(water_level)) uplink_message = bytes([water_level]) s.send(uplink_message) def adjust_water_level(): global water_level # We need to tell Python to use the variable # defined outside this function if pump_running: if water_level < full_level: # Can't be overfilled water_level += 1 # Water level rises else: if water_level > empty_level: # Can't be less than empty water_level -= 1 # Water level drops while(True): # Code at the indent happens every 10 seconds adjust_water_level() send_level() for i in range (10): # 10 x 1 second delay # Code at this indent happens every second check_downlink_messages() if pump_running: # At any time the pump might be stopped pycom.rgbled(COLOUR_GREEN) else: pycom.rgbled(COLOUR_RED) time.sleep(1) # 1 second delay
-
@xavier where are you running that encoder? I'm trying to do something similar with node-red.
-
Problem solved, I didn't have the Encoder setup properly:
function Encoder(object, port) { var bytes = []; if (object.pump_running === 0 || object.pump_running === 1) { bytes[0] = object.pump_running ? 1 : 0; } // There is no separate converter and validator function for this direction. Return an empty array to drop the message. // https://www.thethingsnetwork.org/docs/devices/uno/quick-start.html return bytes; }