Wipy motion and ambient conditions sensor node
-
So far I have a PIR motion sensor which toggles the Wipy LED from yellow to red when triggered by motion, and it is printing the temp/pressure data from a DHT22. Bit of work to understand some dubious readings from the DHT, and need to add MQTT.
My code (below) needs improvement - in particular some motion events are missed, or there appears to be a delay of a couple of seconds before it is triggered. Perhaps my use of time.sleep() is the problem. Any advice on how to improve the code appreciated :-)
Cheers
Robin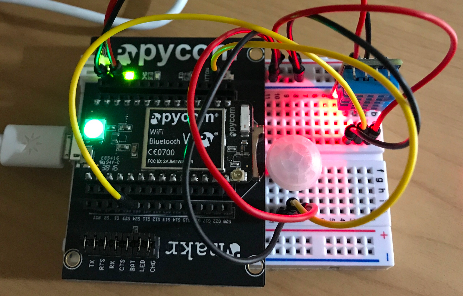
-
@robmarkcole said in Wipy motion and ambient conditions sensor node:
Hi @RobTuDelft the sensor is AM312 Mini PIR Sensor, https://www.amazon.co.uk/gp/product/B016Y10B3O/ref=as_li_ss_tl?tag=brau03-21&ie=UTF8&psc=1&linkCode=ll1&linkId=0bb8888d752ec23f1d451691989542c8
It is used in https://github.com/bruhautomation/ESP-MQTT-JSON-Multisensor and has on-board processing as described in the linked video
-
@robmarkcole It is not really useful to only read the temperature once and keep validating that result in your if-loop? Maybe also include
result = th.read()in the while True-loop.
-
Hi @peekay123 thanks for the advice. Rather than using sleep() would I be better off triggering the data post e.g. on the second?
Re using a flag, I guess you mean something like below? I notice that the LED doesn't switch to red when motion is registered.
Cheers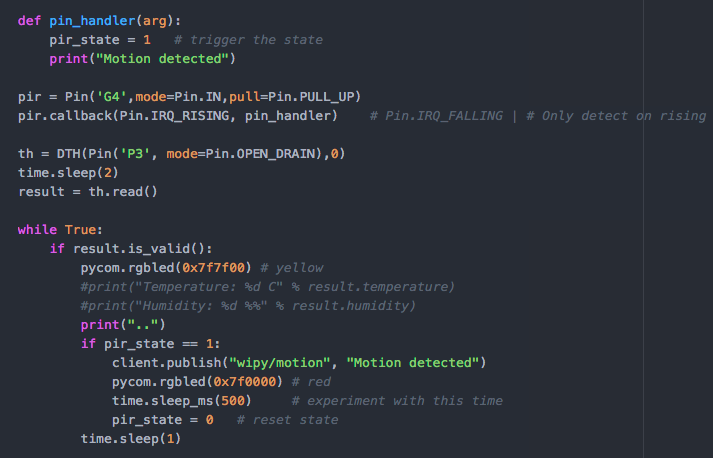
-
Hi @RobTuDelft the sensor is AM312 Mini PIR Sensor, https://www.amazon.co.uk/gp/product/B016Y10B3O/ref=as_li_ss_tl?tag=brau03-21&ie=UTF8&psc=1&linkCode=ll1&linkId=0bb8888d752ec23f1d451691989542c8
-
@robmarkcole, I would take the publish and rgbled code out of the callback and only set a global flag. In your
while Trueloop, read the flag and take action when set. This will minimize the callback timing. As for your rgbled, you could use non-blocking delays instead of harddelay().
-
@robmarkcole Hey Robin, your callback takes more than 500 ms. Since they will be queued sequentially you might experience these delays I guess, 16 x 500 ms = 8 seconds.
Which kind of PIR sensor is that?
-
Unfortunately I can't post the code directly as I keep getting this wretched 'spam error', so see main.py on https://github.com/robmarkcole/Wipy_multisensor