Lopy + PyTrack + Gravity UART GSM/GPRS module
-
Hi everyone,
I am just starting my PyCom journey and I am yet facing some little problems.
I want to connect an A6 GSM/GPRS module (https://www.dfrobot.com/wiki/index.php/Gravity:UART_A6_GSM%26_GPRS_Module_SKU:_TEL0113) to my LoPy board via UART.
The LoPy board is mounted on a Pytrack expansion board and here is my connection :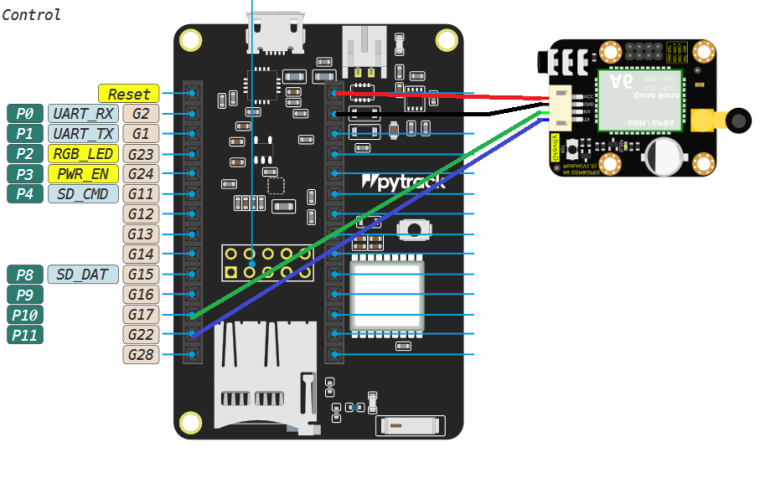
The Lopy is powered by an USB port of my laptop's dock plugged in PyTrack USB.
My code is :
from machine import UART import binascii import utime def update_serial1(): print("Waiting for response ...") utime.sleep(2) while serial1.any(): print("Data read : <{}>".format(binascii.hexlify(serial1.readall()))) def send_and_wait(what): print("Sending <{}> ...".format(what)) nb_sent = serial1.write(what + "\r\n") print("Sent : {}".format(nb_sent)) update_serial1() def loop(): send_and_wait("AT") send_and_wait("ATOI") send_and_wait("AT+CSQ") serial1 = UART(1) serial1.init(baudrate=9600, bits=8, parity=None, stop=1, timeout_chars=2, pins=('P10','P11')) loop()But when I launch my AT commands I only receive 'ff' bytes as you can see in the command line extract here:
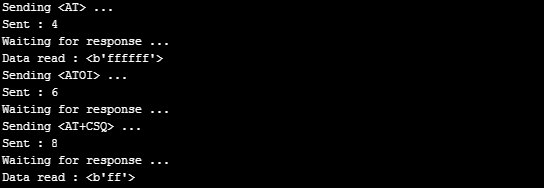
Could anyone tell me what I am doing wrong ? What am I missing ?
Many thanks for your attention ! :-)
Arnaud