lopy to raspberry pi 3 serial connection
-
Hi! I'm trying to get lopy to RPi serial connection to work (https://github.com/Bucknalla/lopy-raspberrypi). I'm on a RPI 3 and have troubleshooted for an entire day now and I surrender. Could someone please try to help me?
From the RPI I have tried /dev/serial0, /dev/ttyS0, /dev/ttyAMA0. I have tried jumper cables from tx-tx, tx-rx, with and without ground. Tried changing the mode of the GPIO form ALT5 to ALT0. Nothing works
The RPI sends the data or at least it writes data to the serial port (no crash at least). But nothing comes up on the Lopy (loops to see if uart1.any() returns True).
All the settings is equal to the example code
Help me please :)
-
@testos As long as you do not use SPI this does not matter. And the SPI pins can be reassigned too. And P11 (External IO 8) seems not to be connected on pytrack. Using I diode tester, I cannot detect any connection. At P10 (external IO 7) seems to be used. At least is show something like a ESD diode behavior of an active chip pin.
-
Hello again,
@crumble, @robert-hh I can not use P11 (G22) instead of P8 ?
From the fipy documentation I can see that P11 is use by SPI ( MOSI ) but it's written :
Please note that the PIN assignments for UART1 (TX1/RX1), SPI (CLK, MOSI, MISO) and I2C (SDA, SCL) are defaults and can be changed in Software.I can not just re-assign the mosi on a different pin ? I did not find yet doc on that.
Thanks
-
@crumble But then still P10 and P11 are available.
-
Please note that P8 (G15) is used by the SD-Card interface. So you can't use them at the same time.
-
@robert-hh Thanks for the guidance, I will give a try during my holiday next week.
Just for clarification, the P3/P4 that you talk about are from the fipy ? and by doing the following ...
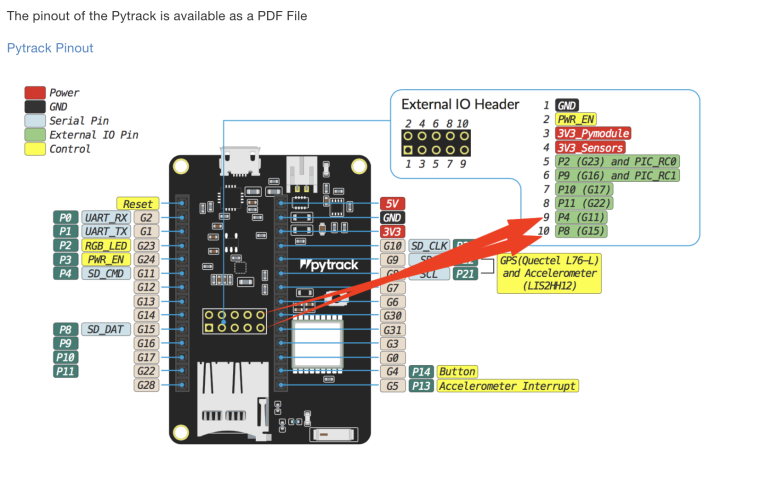
from machine import UART uart1 = UART(1, 115200, pins=("P8", "P4")) # P8=Tx, P4=Rx... it will re-assign them on the pytrack on the 2 pin P4/P8 on the External IO Header shown on the picture ?
Thanks again for your time.
-
@testos Yes, that's right. The picture shown an expansion board. On the pytrack, P3 and P4 are not that easily accessible. The connector below the Lopy has P4, P8, P10 and P11 available. So you have to re-assign the UART pin when you init the UART with the pins parameter, like:
from machine import UART uart1 = UART(1, 115200, pins=("P8", "P4")) # P8=Tx, P4=Rx
-
@robert-hh THanks for your quick answerr, yes I agree, but on the first picture, it's not the expansion board that he use ?
Br, Testos
-
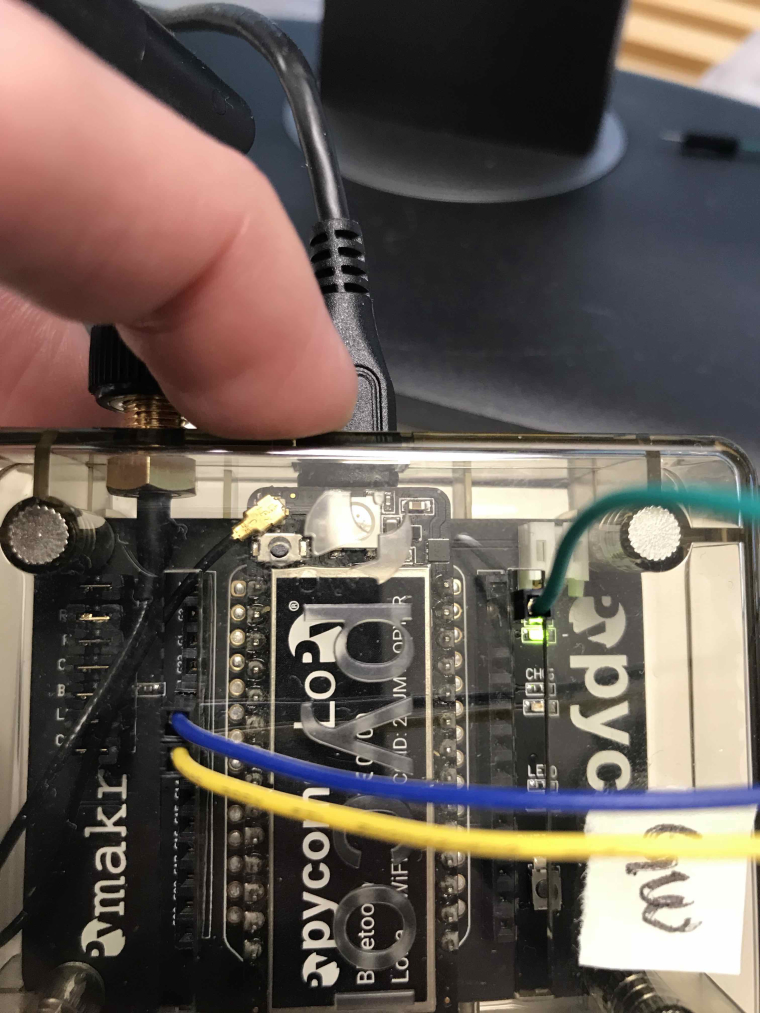
@testos If you look at the code and pictures below by @thomand1000, it is actually using UART1 with TX1, RX1 and GND connected to the rPi.
-
Hello,
Sorry to ask, I'm novice in that field, coding is not an issue, but the electronic part is still a bit tricky for me....
Is it required to have the expansion board to connect the lopy to the rpi ?
In my case I have a pytrack + fipy and I was wondering if I can also send the gps and accelerometer data to a rapsberry Zero in a similar way ?
Looking at the rpi-zero io pins I can see that there are RX/TX and GND pins : http://raspberry-projects.com/pi/pi-hardware/raspberry-pi-zero/rpi-zero-io-pins
Similar as the fipy : https://docs.pycom.io/datasheets/development/fipy.html ( RX1 / TX1 / GND ), can I use those ?
Thanks by advance.
-
@hsn548 Here is the code I used to get it working. Be sure to place the jumper cables in the right place. I had the cables in the wrong place at first.

The following code works for me (i made a class for all the code on the RPI. Just import it and make a new PiGateway() and call its methods).
RPi code:
#run script as super user (e.g. $ sudo python3 sendlora.py)
import serial, timeclass PiGateway: def __init__(self): self.ser = serial.Serial('/dev/serial0', 115200, timeout=10) def readFile(self, filename): f = open(filename,'r') content = f.read() f.close() return content def sendToLopy(self, device_id, data): n = 254 id = "id=" + str(device_id) sendingDone = "sending done" #split data into 255 byte chunks for sending splitData = [data[i:i+n] for i in range(0, len(data), n)] #send device_id first. Wait one second between each packet to prevent collisions. self.ser.write(bytes(id, 'utf-8')) time.sleep(1) for dataChunk in splitData: #send each chunjk of data self.ser.write(bytes(dataChunk,'utf-8')) time.sleep(1) #send a string notifying that the transmission is done self.ser.write(bytes(sendingDone, 'utf-8')) def getFromLopy(self): while True: if (self.ser.in_waiting > 0): received = self.ser.read(self.ser.in_waiting).decode('utf-8') return received time.sleep(1)on the Lopy the code was the following:
import machine, time, pycom pycom.heartbeat(False) pycom.rgbled(0x000000) uart1 = UART(1, 115300, bits=8, parity=None, stop=1) uart1.init(baudrate=115200, bits=8, parity=None, stop=1) while True: if uart1.any(): receiving = uart1.read().decode('utf-8') #Do something with what you receive here #I used exec(receiving) -> entire code sent from Rpi to be executed on Lopy. It works time.sleep(5) #remember to break here sometime time.sleep(1)Good luck
-
@thomand1000 Hi Thomas, Can you please share your working code? as i am also having the same problem... I shall be really thankful.. :D
-
@robert-hh Thank you very much! It didn't work right away, but I decided to try to eliminate faulty cables etc. So I made one script for each direction and tested them individually. I now have communication both ways, so then I just need to get the logic for when to read and write right and I'm good. For anyone struggling with this in the future the following worked for me (the initialization of both sides are like before):
Lopy->Rpi
code on the lopy:
uart1.write('some string')code on the Rpi:
print(ser.read(ser.in_waiting))Rpi -> lopy
code on the Rpi:
ser.write('some string')code on the lopy:
print(uart1.read())Thanks for everyone helping me! :)
-
@thomand1000 Yes, like Robert said, you should be reading on one machine and writing on the other initially. Also, for clarity, specify bits, parity and stop also on the RPi side..
-
@thomand1000 It seems that in both code samples you first send something, and then wait for a response. I would have expected that you interlock that, so whwn you send something form one side, you would wait for data on the other side.
The fact that you see somthing on the rpi side might be caused by buffering in the serial driver for any data that might arrive, even when no instance is waiting for it.
-
lopy code:
from machine import UART import pycom, time pycom.heartbeat(False) # turn off heartbeat uart1 = UART(1, 115200, bits=8, parity=None, stop=1) uart1.init(baudrate=115200, bits=8, parity=None, stop=1) while True: uart1.write('test') if uart1.any(): data = uart1.readall() pycom.rgbled(0xFF0000) # set LED to RED on if data received if data == b'send': uart1.write("SendToPi") pycom.rgbled(0x00FF00) # set LED to GREEN if data is b'send' time.sleep(1) pycom.rgbled(0x000000) time.sleep(0.25)RPi code:
import serial with serial.Serial('/dev/serial0', 115200, timeout=10) as ser: ser.write(b'send') print(ser.read(4)) #prints b'test'. So link from lopy seems ok. print("Data Sent")Now the messages from the lopy to the Rpi go through, but not the other way. It doesn't look like uart1.any() returns True at any point.
Any suggestions or help would be awesome!
Thanks :)
-
@thomand1000 That does not look good. Can you share your code on both sides?
-
@crumble Thank you very much. And all you other guys also. That did the trick. I'm trying to send the string b'send', but b'dsen' is received at the lopy. But this is probably an easy fix right?
And b'sending this string' gets received as b'tringsending this s'
Has this something to do with uarts readall or readline methods?
-
@crumble said in lopy to raspberry pi 3 serial connection:
Please tell us the settings which works on your machine ;)
It's running now. I had to do the following settings on the Pi3:
in /boot/config.txtenable_uart=1 dtoverlay=pi3-miniuart-btI don't know if it necessary but i called as well
sudo systemctl disable hciuartAfter these changes and reboot I had a stable serial device without noise on
/dev/ttyAMA0Without these settings I got a lot of noise on /dev/ttyS0. Noise was gone after I had send a few lines from the Pi3.
-
@thomand1000 I struggle right now with the Pi3 and a PC via serial. The Bluetooth of the Pi3 interferes with the UART. You have to disable the bluetooth on the Pi3 to get predictable results. Sadly I can't help you, 'cause it is not running at the moment so I may have to do the frequency settings of the GPU as well. Simply google for pi3 serial and bluetooth.
Please tell us the settings which works on your machine ;)