Errors using _thread, why?
-
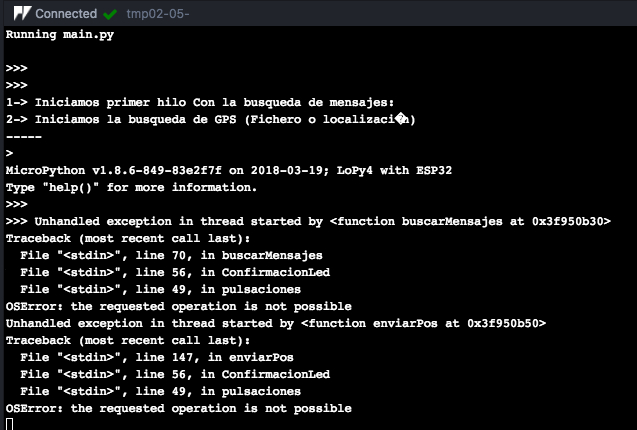
Why is this error? It's the first test I do with _thread and everything was working fine but it has been putting the file in a different Lopy and it does not work out those errors:
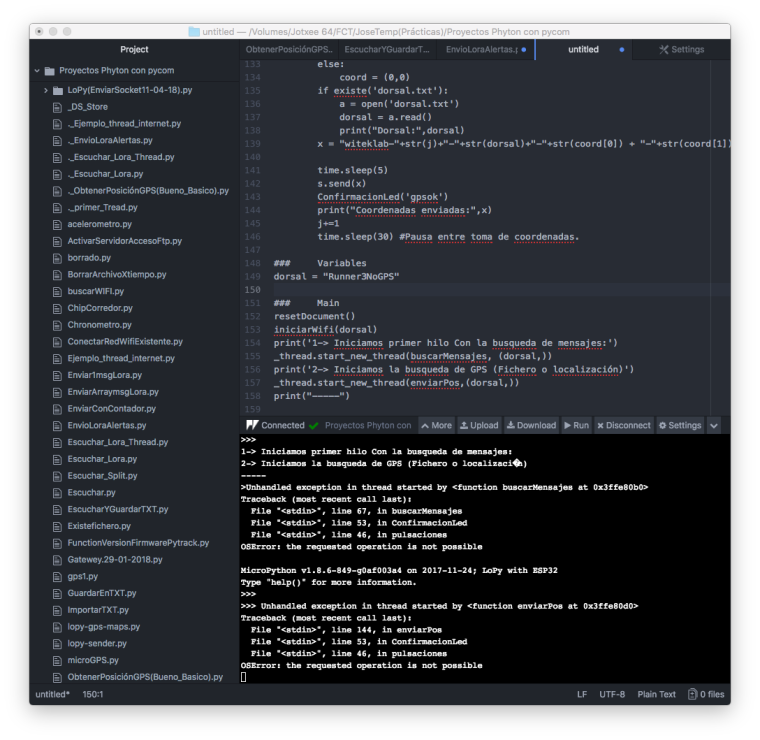
The code is this:
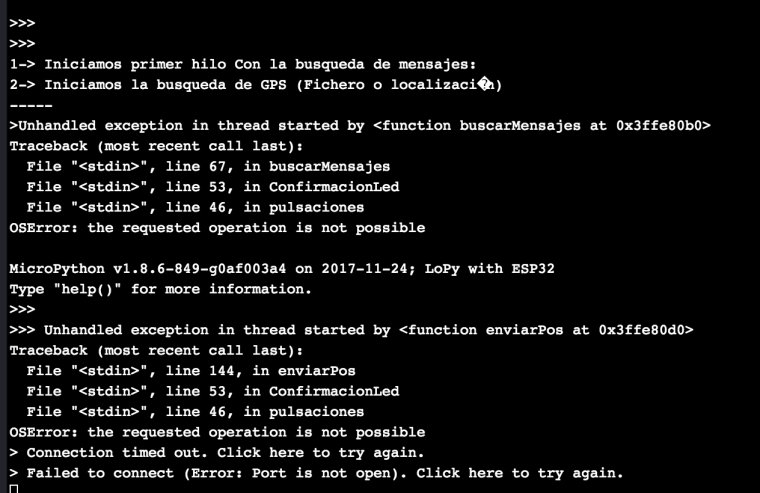
# Revisado y actualizado el 26 de Abril de 2018 By Jotxee import _thread import machine import math import network import os import time import utime import pycom #Iniciar nuevo thread: _thread.start_new_thread # setup LoRa: from network import LoRa import socket lora = LoRa(mode=LoRa.LORA) s = socket.socket(socket.AF_LORA, socket.SOCK_RAW) ### Funciones def iniciarWifi(dorsal): try: import network from network import WLAN wlan = network.WLAN(mode=network.WLAN.STA) wlan.init(mode=WLAN.AP, ssid=dorsal, auth=(WLAN.WPA2,'witeklab@2018'), channel=1, antenna=WLAN.INT_ANT) from network import Server server = Server(login=('micro', 'python'), timeout=600) server.timeout(300) server.timeout() server.isrunning() return True except: return False def existe(arg): try: fichero = open(arg) fichero.close() return True except: return False def pulsaciones(color): for x in range(3): pycom.rgbled(color) time.sleep(0.1) pycom.heartbeat(False) time.sleep(0.1) def ConfirmacionLed(funcion): funciones={'bluetooth':0x0007F,'gpsok':0xfffe02,'nogps':0x7f0000,'encendido':0x7f700,'sendalert':0xC011EB,'buscandoalerta':0xffffff}# wifi(azul) | gpsok(Amarillo) | nogps(rojo) | encendido(verde) | sendalert(lila)| -gpsok(amarillo) | buscandoalerta(blanco) pulsaciones(funciones[funcion]) def resetDocument(): #Lista de documentos posible: alerta.txt | dorsal.txt | myposition.txt | registro.txt | seguidores.txt lista = ['alerta','dorsal','myposition','registro','seguidores'] for i in lista: if existe(i+'.txt'): print('Borrando',i+'.txt') os.remove(i+'.txt') def buscarMensajes(dorsal): alertas=[] while True: ConfirmacionLed('buscandoalerta') tiempo = time.time() s.setblocking(True) data = s.recv(128) if existe('dorsal.txt'): a = open('dorsal.txt') dorsal = a.read() print("Mensaje recibido:",data) ide =data.decode("utf-8") #identificacion ide = ide.split('-') if ide[0] == 'alerta': if ide[1] not in alertas: tmp = tiempo alertas.append(ide[1]) cuenta = 0 for z in ide[1]: if z ==";": cuenta+=1 #print("Cuenta-->",cuenta) if cuenta == 1: print("Este mensaje es personalizado:",ide[1]) dor = ide[1].split(';') if dor[0]==dorsal: ConfirmacionLed('bluetooth') f = open ('alertapersonalizada.txt', 'a')#Modo 'a' Para a�adir no sobre escribir #print("Mensaje que se guardara = ",dor[1]) f.write(dor[1]+"|") f.close() else: print("Alerta Generica",ide[0]) ConfirmacionLed('bluetooth') f = open ('alerta.txt', 'a')#Modo 'a' Para a�adir no sobre escribir f.write(ide[1]+"|") f.close() else: print("Tiempo-",tiempo,"tmp",tmp,"=",tiempo-tmp) if tiempo-tmp >= 300: #Si han pasado 5 minutos Borramos array alertas y ficheros del LoPy: if existe('alerta.txt'): os.remove('alerta.txt') elif existe('alertapersonalizada.txt'): os.remove('alertapersonalizada.txt') del alertas[:] tmp = tiempo print("Asi estan las alertas=",alertas) elif ide[0] == 'seguidores': dor = ide[1] ide = ide[1].split(';') print("Dorsal destino:",ide[0]) if ide[0]==dorsal: print("dentro del mismo dorsal: ",dor) ConfirmacionLed('bluetooth') f = open ('seguidores.txt', 'w')#Modo 'a' Para a�adir no sobre escribir f.write(dor) f.close() def recogerPosGPSMovil(): x = open('myposition.txt') x = x.read().split(';') lat_d = x[0] lon_d = x[1] return(lat_d, lon_d) def enviarPos(dorsal): j=0 while True: if existe('myposition.txt'): coord = recogerPosGPSMovil() else: coord = (0,0) if existe('dorsal.txt'): a = open('dorsal.txt') dorsal = a.read() print("Dorsal:",dorsal) x = "witeklab-"+str(j)+"-"+str(dorsal)+"-"+str(coord[0]) + "-"+str(coord[1]) time.sleep(5) s.send(x) ConfirmacionLed('gpsok') print("Coordenadas enviadas:",x) j+=1 time.sleep(30) #Pausa entre toma de coordenadas. ### Variables dorsal = "Runner3NoGPS" ### Main resetDocument() iniciarWifi(dorsal) print('1-> Iniciamos primer hilo Con la busqueda de mensajes:') _thread.start_new_thread(buscarMensajes, (dorsal,)) print('2-> Iniciamos la busqueda de GPS (Fichero o localización)') _thread.start_new_thread(enviarPos,(dorsal,)) print("-----")Enlargement of the image of the errors, in case it does not look good:
-
https://forum.pycom.io/topic/2431/lopy-with-pytrack-how-connect-use-gps
The same thing happens to me, but indicating another error that already happened to me with the first Lopy.
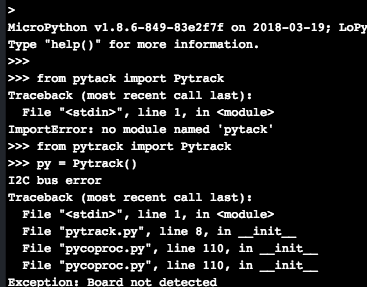
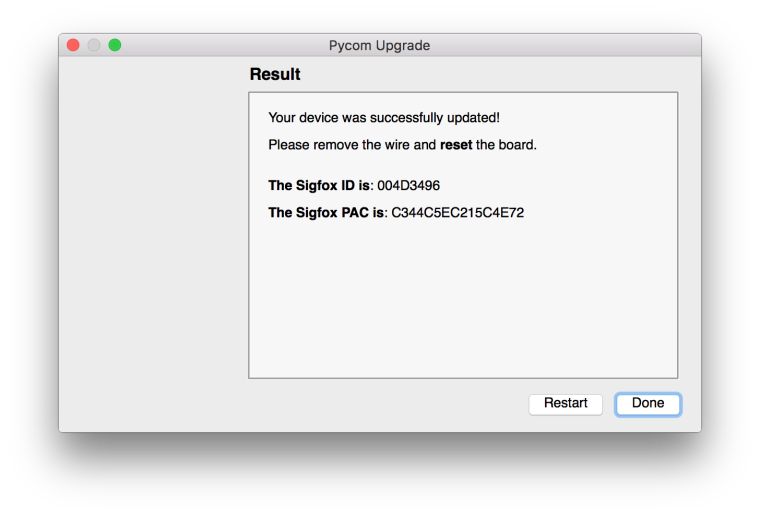
Right now they are other Lopy but theoretically updated with the software:

But now I get this error:
I have tried all the ways I've seen of how to update the Lopy board or the expansion Board 2.0.
If I try to update the expansion board as I did in its day, it does not detect it anymore:
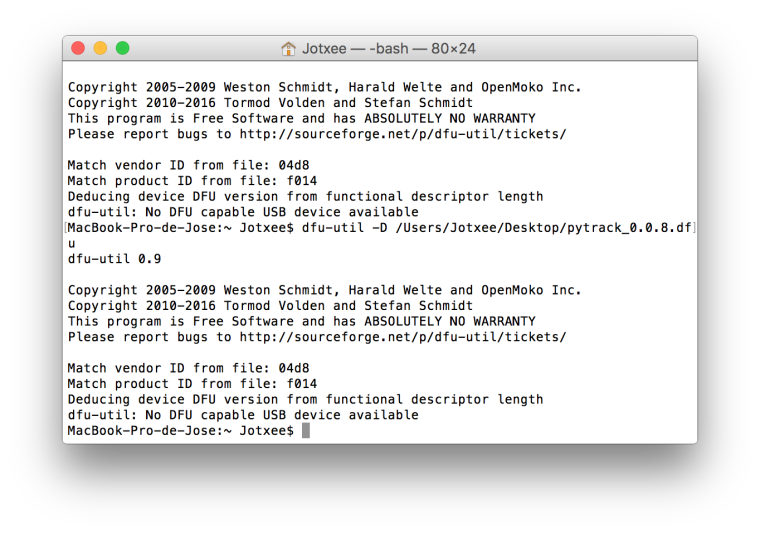 Captura de pantalla 2018-05-03 15.37.08
Captura de pantalla 2018-05-03 15.37.08and if I do the lopy update for the official software it says 'done' but it still does not work ... Does anyone know what's going on?
Another curious fact is that I put the program file main.py or boot.py with the program that I have set does not work. but sometimes that other without jumping the error that I just porner up sometimes runs it well from Atom ...?
I sincerely believe I have tried all the ways to update the Lopy and supposedly the expansion board is updated. Therefore, I do not know what is failing.
If someone can tell me what would be the process of update contract both the expansion board and the Lopy on Mac or Windows I do not care. But to verify that it can happen.
regards.
-
hi!
Well ... it can be, although if that is the case, the firmware update program does not work correctly.
I wanted to check at the time if it had been updated correctly. But I gave failures (1) as I happened in his day and I think it was because I did not have the pycoproc library and I assumed that it had been done well.
(1) The failures I gave was because I could not find the library inside the module.
- The code that petaba me when I wanted to look at the version is this:
from pytrack import Pytrack py = Pytrack() py.read_fw_version() print("Version=",py.read_fw_version())- La herramienta que he usado para actualizar es ésta:

I will have to look at myself as I did in his day. Because I remember that I had problems too. Honestly the process in the documentation is not very clear.
Because once you put the bridge on the board between port Gnd and 23, you have to keep the button pressed while you connect to the updater or not?
In any case, try both. But the other time it seems to me that it only worked well with the terminal commands.
I also have not had more time today to continue testing.
-
@zceld
From the log it looks like you're running a very old version of the firmware (November 2017), maybe the other LoPy was more up to date?