Time & Interrupts
-
Dear Developers,
i am currently trying to develop a driver for the DHT11/DHT22 by using
interrupt and callback handlers.
The sensor sends its data by toggling the data pin from high to low.
These flanks are already detected by my code, i can count them and all are
detected.But i need to measure the time difference between the flanks, a 1
has the length of approx. 130 us and a 0 of approx. 78 us.
When executing the code, the recorded time stamps are all above 130 us,
so they are unusable. Is there any possibility to speed things up here?
I assume that the queuing of interrupts produces those long times.Here is the result of a measurement:
[120.575, 256.6, 401.2, 547.225, 682.625, 829.225, 973.1, 1109.5, 1255.1, 1402.6, 1548.6, 1681.4, 1826.45, 1979.675, 2122.75, 2265.425, 2389.325, 2535.075, 2668.4, 2802.9, 2957.15, 3092.35, 3227.575, 3360.9, 3505.95, 3640.4, 3786.925, 3925.85, 4060.325, 4184.05, 4307.825, 4431.625, 4555.325, 4679.05, 4802.825, 4934.1, 5057.8, 5181.525, 5305.3, 5429.1, 5552.8, 5676.525]
Here is the code of the handler:
def handler(self, arg): self._samples[self._samplesIndex] = self._chronometer.read_us() # Increase the index if we are still within the bounds of the array if(self._samplesIndex < self._MAXSAMPLES - 1): self._samplesIndex = self._samplesIndex + 1and here the code to register the handler:
self._dataPin.callback(Pin.IRQ_FALLING, self._irqHandler.handler)Any ideas how to improve the situation?
Many thanks in advance,
Marc
-
@Emmanuel-Goudot Yes, that's the piece of code below, which works for my DHT22 on a Lopy. It is buried far below in a thread, where two people fight to get it running(https://forum.pycom.io/topic/1172/pure-python-library-for-reading-dht-sensor-on-pycom-boards). No clue what their problem is, since I consider it solved, even if not bullet proof.
import time from machine import enable_irq, disable_irq, Pin class DTHResult: 'DHT sensor result returned by DHT.read() method' ERR_NO_ERROR = 0 ERR_MISSING_DATA = 1 ERR_CRC = 2 error_code = ERR_NO_ERROR temperature = -1 humidity = -1 def __init__(self, error_code, temperature, humidity): self.error_code = error_code self.temperature = temperature self.humidity = humidity def is_valid(self): return self.error_code == DTHResult.ERR_NO_ERROR class DTH: 'DHT sensor (dht11, dht21,dht22) reader class for Pycom' __pin = Pin('P3', mode=Pin.OPEN_DRAIN) __dhttype = 0 def __init__(self, pin, sensor=0): self.__pin = pin self.__pin(1) self.__dhttype = sensor def read(self): time.sleep(1) # send initial high #self.__send_and_sleep(1, 25000) # pull down to low #self.__send_and_sleep(0, 40000) # collect data into an array data = self.__collect_input() # parse lengths of all data pull up periods pull_up_lengths = self.__parse_data_pull_up_lengths(data) # if bit count mismatch, return error (4 byte data + 1 byte checksum) print(pull_up_lengths) if len(pull_up_lengths) != 40: return DTHResult(DTHResult.ERR_MISSING_DATA, 0, 0) # calculate bits from lengths of the pull up periods bits = self.__calculate_bits(pull_up_lengths) # we have the bits, calculate bytes the_bytes = self.__bits_to_bytes(bits) print(the_bytes) # calculate checksum and check checksum = self.__calculate_checksum(the_bytes) if the_bytes[4] != checksum: return DTHResult(DTHResult.ERR_CRC, 0, 0) # ok, we have valid data, return it [int_rh, dec_rh, int_t, dec_t, csum] = the_bytes if self.__dhttype==0: #dht11 rh = int_rh #dht11 20% ~ 90% t = int_t #dht11 0..50°C else: #dht21,dht22 rh = ((int_rh * 256) + dec_rh)/10 t = (((int_t & 0x7F) * 256) + dec_t)/10 if (int_t & 0x80) > 0: t *= -1 return DTHResult(DTHResult.ERR_NO_ERROR, t, rh) def __send_and_sleep(self, output, mysleep): self.__pin(output) time.sleep_us(mysleep) def __collect_input(self): # collect the data while unchanged found unchanged_count = 0 # this is used to determine where is the end of the data max_unchanged_count = 100 last = -1 data = [] m = [1]*500 # needs long sample size to grab all the bits from the DHT self.__pin(0) time.sleep_us(20000) self.__pin(1) irqf = disable_irq() for i in range(len(m)): m[i] = self.__pin() ## sample input and store value enable_irq(irqf) for i in range(len(m)): current = m[i] data.append(current) if last != current: unchanged_count = 0 last = current else: unchanged_count += 1 if unchanged_count > max_unchanged_count: break #print(data) return data def __parse_data_pull_up_lengths(self, data): STATE_INIT_PULL_DOWN = 1 STATE_INIT_PULL_UP = 2 STATE_DATA_FIRST_PULL_DOWN = 3 STATE_DATA_PULL_UP = 4 STATE_DATA_PULL_DOWN = 5 state = STATE_INIT_PULL_UP lengths = [] # will contain the lengths of data pull up periods current_length = 0 # will contain the length of the previous period for i in range(len(data)): current = data[i] current_length += 1 if state == STATE_INIT_PULL_DOWN: if current == 0: # ok, we got the initial pull down state = STATE_INIT_PULL_UP continue else: continue if state == STATE_INIT_PULL_UP: if current == 1: # ok, we got the initial pull up state = STATE_DATA_FIRST_PULL_DOWN continue else: continue if state == STATE_DATA_FIRST_PULL_DOWN: if current == 0: # we have the initial pull down, the next will be the data pull up state = STATE_DATA_PULL_UP continue else: continue if state == STATE_DATA_PULL_UP: if current == 1: # data pulled up, the length of this pull up will determine whether it is 0 or 1 current_length = 0 state = STATE_DATA_PULL_DOWN continue else: continue if state == STATE_DATA_PULL_DOWN: if current == 0: # pulled down, we store the length of the previous pull up period lengths.append(current_length) state = STATE_DATA_PULL_UP continue else: continue return lengths def __calculate_bits(self, pull_up_lengths): # find shortest and longest period shortest_pull_up = 1000 longest_pull_up = 0 for i in range(0, len(pull_up_lengths)): length = pull_up_lengths[i] if length < shortest_pull_up: shortest_pull_up = length if length > longest_pull_up: longest_pull_up = length # use the halfway to determine whether the period it is long or short halfway = shortest_pull_up + (longest_pull_up - shortest_pull_up) / 2 bits = [] for i in range(0, len(pull_up_lengths)): bit = False if pull_up_lengths[i] > halfway: bit = True bits.append(bit) return bits def __bits_to_bytes(self, bits): the_bytes = [] byte = 0 for i in range(0, len(bits)): byte = byte << 1 if (bits[i]): byte = byte | 1 else: byte = byte | 0 if ((i + 1) % 8 == 0): the_bytes.append(byte) byte = 0 #print(the_bytes) return the_bytes def __calculate_checksum(self, the_bytes): return the_bytes[0] + the_bytes[1] + the_bytes[2] + the_bytes[3] & 255
-
Hello @robert-hh ,
I guess you have succeeded working with DHT11/DHT22 ?
Could you share python library (that work) ?
Thanks a lot,
Emmanuel.
-
@MaSePreetz There was a discussion about pin interrupt latency here: https://forum.pycom.io/topic/936/pin-interrupt-latency
Unless newer version of the firmware improve things drastically, there is no chance to get data from the DHT11/DHT22 with an interrupt using driver. The only Python method that works for me is a busy polling method.
-
Hello @livius ,
with such interrupt handler:

tested with
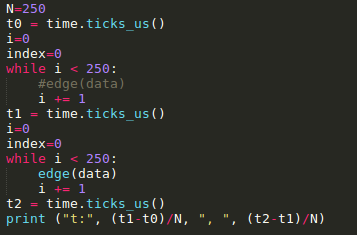
I get such results:

empty loop ~25µs, loop with hadler: ~85µs (handler alone: 65µs ?)
deltas are differences of time.ticks_us() and minimum value I get is ~84µsWould it be possible to add value of timer inside the object passed to interrupt handler, or as second parameter ???
BR,
Emmanuel.
-
Hi Marc,
I've also tried to measure a DHT22's pulse length using an interrupt callbacks. Even with the smallest (and hopefully fastest) interrupt routine I got the same results as you did; I never measured a pulse length below 100 us.
For what I did and the results see here: https://github.com/erikdelange/WiPy-2.0-DHT22
In the end the only thing which worked for me was to use polling, and even then I had to temporarily disable interrupts to get a usable result.
Regards
Erik
-
When executing the code, the recorded time stamps are all above 130 us,
You register for IRQ_FALLING, then how you detect how long is 0 and how long is 1?
For IRQ_FALLING you get info that it is changing from 1 to 0. and e.g. it stay in 0 for 50us and it raising to 1 and stay for 100us and then back you get IRQ_FALLING
you count this as 150us but do not know how long is 0 and how long is 1.EDIT
Ah i forgot that DHT send low 50us and variable length of high like 28 for 0 and 70 for 1
then your concept is good - you should got 78us for 0 or 120us for 1But for dht better is to Pull pin
https://github.com/adafruit/DHT-sensor-library/blob/master/DHT.cpp
and i do not know how long your operation inhandlertake time?Try to measure it in e.g. 1000 loop - what you got?