LoPy4 LoRaWAN OTAA tx_counter not incrementing
-
I am currently using a LoPy4 as a node for LoRaWAN OTAA transmission of ultrasonic sensor readings. My issue is that for some reason, after adding the code to read ultrasonic sensor readings from pins on the expansion board, my data is transmitted every 2 seconds but the packet counter never changes, thus preventing me from being able to enable Frame Counter Checks. My gateway receives all of the messages, but if Frame Counter Checks are enabled, only the first datapoint is received by my application on The Things Network. Below is my code.
from network import LoRa from machine import Pin from machine import Timer import pycom import socket import utime import time import ustruct import ubinascii # Colors off = 0x000000 red = 0xff0000 green = 0x00ff00 blue = 0x0000ff pycom.heartbeat(False) # Initialise LoRa in LORAWAN mode. # Please pick the region that matches where you are using the device: # Asia = LoRa.AS923 # Australia = LoRa.AU915 # Europe = LoRa.EU868 # United States = LoRa.US915 lora = LoRa(mode=LoRa.LORAWAN, region=LoRa.US915, tx_power=20, bandwidth = LoRa.BW_500KHZ, sf=7, frequency = 903900000) def lora_cb(lora): events = lora.events() if events & LoRa.RX_PACKET_EVENT: print('Lora packet received') if events & LoRa.TX_PACKET_EVENT: print('Lora packet sent') lora.nvram_restore() lora.nvram_erase() # remove all the channels the gateway doesn't use for channel in range(16, 72): lora.remove_channel(channel) for channel in range(0,7): lora.remove_channel(channel) # create an OTAA authentication parameters dev_eui = ubinascii.unhexlify('70B3D549952757BF') # these settings can be found from TTN app_eui = ubinascii.unhexlify('70B3D57ED0028A4F') app_key = ubinascii.unhexlify('88397B010F71D34BEDF77DA003C3A54C') # join a network using OTAA (Over the Air Activation) if not lora.has_joined(): lora.join(activation=LoRa.OTAA, auth=(app_eui, app_key), timeout=0) pycom.rgbled(green) time.sleep(2.5) handshk_time = Timer.Chrono() handshk_time.start() # wait until the module has joined the network while not lora.has_joined(): pycom.rgbled(off) time.sleep(0.1) pycom.rgbled(red) time.sleep(2.4) print('Not yet joined...') lora.nvram_save() handshk_time.stop() print("Total handshake time: {0}".format(handshk_time.read())) print('Joined!') pycom.rgbled(blue) # create a LoRa socket s = socket.socket(socket.AF_LORA, socket.SOCK_RAW) #set to confirmed type of messages # set the LoRaWAN data rate s.setsockopt(socket.SOL_LORA, socket.SO_DR, 3) # make the socket blocking # (waits for the data to be sent and for the 2 receive windows to expire) s.setblocking(True) # send some data s.send(bytes([0x01, 0x02, 0x03])) # make the socket non-blocking # (because if there's no data received it will block forever...) s.setblocking(False) time.sleep(3.0) # get any data received (if any...) data = s.recvfrom(128) print(data) i = 7 trigger = Pin('P7', mode=Pin.OUT) echo = Pin('P8', mode=Pin.IN) trigger.value(0) # Ultrasonic distance measurment def distance_measure(): # trigger pulse LOW for 2us (just in case) trigger(0) utime.sleep_us(2) # trigger HIGH for a 10us pulse trigger(1) utime.sleep_us(10) trigger(0) # wait for the rising edge of the echo then start timer while echo() == 0: pass start = utime.ticks_us() # wait for end of echo pulse then stop timer while echo() == 1: pass finish = utime.ticks_us() # pause for 20ms to prevent overlapping echos utime.sleep_ms(20) # calculate distance by using time difference between start and stop # speed of sound 340m/s or .034cm/us. Time * .034cm/us = Distance sound travelled there and back # divide by two for distance to object detected. # Note: changing the multiplying factor to 0.0133858 for inches distance = ((utime.ticks_diff(start, finish)) * 0.034)/2 return distance*-1 # to reduce errors we take ten readings and use the median def distance_median(): # initialise the list distance_samples = [] # take 10 samples and append them into the list for count in range(10): distance_samples.append(int(distance_measure())) # sort the list distance_samples = sorted(distance_samples) # take the center list row value (median average) distance_median = distance_samples[int(len(distance_samples)/2)] # apply the function to scale to volts print(distance_samples) return int(distance_median) # set LED to red pycom.rgbled(red) #s.settimeout(3) # limit to 200 packets; just in case power is left on while True: # take distance measurment, turn the light blue when measuring pycom.rgbled(blue) distance = distance_median() #utime.sleep_us(100) print("distance = {0} inches".format(distance)) utime.sleep_ms(100) #print('Sending distance') pycom.rgbled(green) #Sending... packet = ustruct.pack('f', distance) print("Packet= {0}".format(ustruct.unpack('f',packet))) try: s.send(packet) except OSError as e: if e.args[0] == 11: # EAGAIN error occurred, add your retry logic here time.sleep(2) s.send(packet) print('error!') s.recvfrom(128) print(lora.stats(),'\n') time.sleep(2)I have noticed that specifically, the only lines of code that cause this issue are the three lines where I initialize pins at outputs/inputs and trigger them:
trigger = Pin('P7', mode=Pin.OUT) echo = Pin('P8', mode=Pin.IN) trigger.value(0)In my TTN application, here is an example of the packet counter failing to increment.
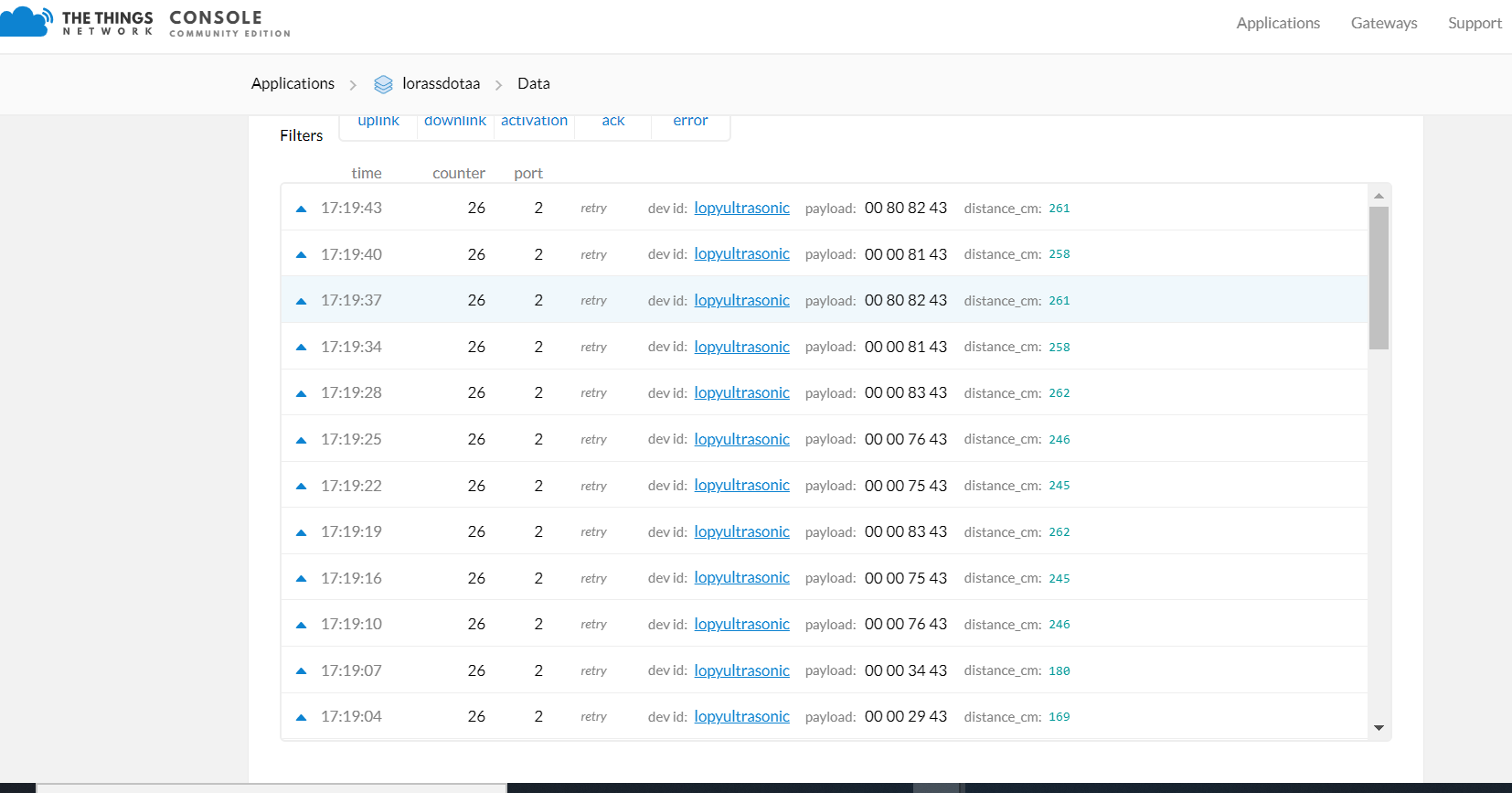
However, this is not an issue at all if I remove the three lines of code mentioned above and send a variable 'i' every 2 seconds. Without those three lines of code, my packets increment just fine. Does anyone know what might be causing this issue?
-
@robert-hh I changed P8 to P9 and it works great! Thank you so much!
-
@aplountz p5, p6 and P7 are connected to the Lora module. So you must not use these for other purposes.