Import Custom Library
-
Greetings,
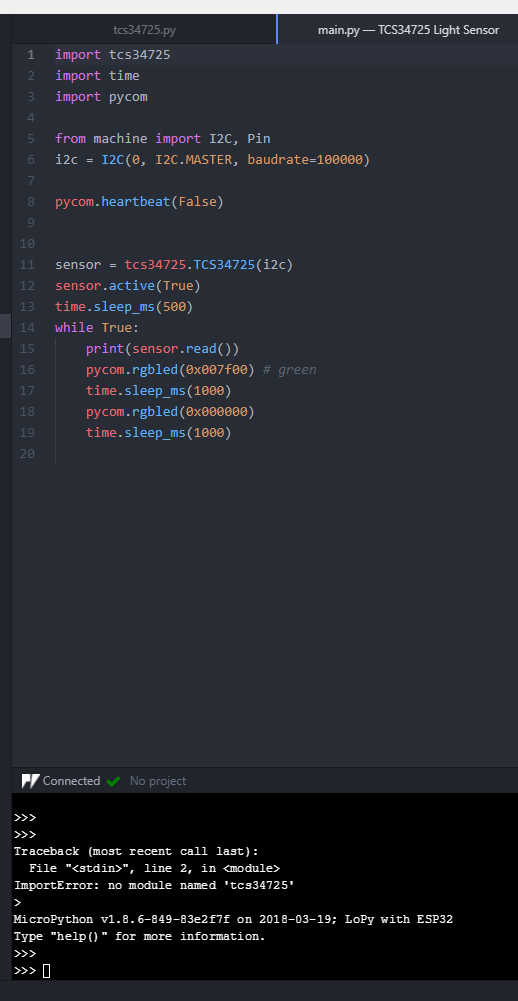
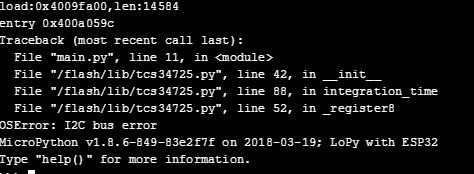
I am using a LoPy with atom, and I am having some issues with using a custom library file. I'm still a bit unfamiliar with how files are linked in Python. I am using tcs34725 from adafruit and there is some documentation on GitHub that I would like to use. I copied the "header" type file and included it in my project folder with the main.py code. When I run the code it cannot find the module. When I download it onto the chip and place this file into the "lib" section I get errors. See images below...
import time import ustruct #const = lambda x:x _COMMAND_BIT = const(0x80) _REGISTER_ENABLE = const(0x00) _REGISTER_ATIME = const(0x01) _REGISTER_AILT = const(0x04) _REGISTER_AIHT = const(0x06) _REGISTER_ID = const(0x12) _REGISTER_APERS = const(0x0c) _REGISTER_CONTROL = const(0x0f) _REGISTER_SENSORID = const(0x12) _REGISTER_STATUS = const(0x13) _REGISTER_CDATA = const(0x14) _REGISTER_RDATA = const(0x16) _REGISTER_GDATA = const(0x18) _REGISTER_BDATA = const(0x1a) _ENABLE_AIEN = const(0x10) _ENABLE_WEN = const(0x08) _ENABLE_AEN = const(0x02) _ENABLE_PON = const(0x01) _GAINS = (1, 4, 16, 60) _CYCLES = (0, 1, 2, 3, 5, 10, 15, 20, 25, 30, 35, 40, 45, 50, 55, 60) class TCS34725: def __init__(self, i2c, address=0x29): self.i2c = i2c self.address = address self._active = False self.integration_time(2.4) sensor_id = self.sensor_id() if sensor_id not in (0x44, 0x10): raise RuntimeError("wrong sensor id 0x{:x}".format(sensor_id)) def _register8(self, register, value=None): register |= _COMMAND_BIT if value is None: return self.i2c.readfrom_mem(self.address, register, 1)[0] data = ustruct.pack('<B', value) self.i2c.writeto_mem(self.address, register, data) def _register16(self, register, value=None): register |= _COMMAND_BIT if value is None: data = self.i2c.readfrom_mem(self.address, register, 2) return ustruct.unpack('<H', data)[0] data = ustruct.pack('<H', value) self.i2c.writeto_mem(self.address, register, data) def active(self, value=None): if value is None: return self._active value = bool(value) if self._active == value: return self._active = value enable = self._register8(_REGISTER_ENABLE) if value: self._register8(_REGISTER_ENABLE, enable | _ENABLE_PON) time.sleep_ms(3) self._register8(_REGISTER_ENABLE, enable | _ENABLE_PON | _ENABLE_AEN) else: self._register8(_REGISTER_ENABLE, enable & ~(_ENABLE_PON | _ENABLE_AEN)) def sensor_id(self): return self._register8(_REGISTER_SENSORID) def integration_time(self, value=None): if value is None: return self._integration_time value = min(614.4, max(2.4, value)) cycles = int(value / 2.4) self._integration_time = cycles * 2.4 return self._register8(_REGISTER_ATIME, 256 - cycles) def gain(self, value): if value is None: return _GAINS[self._register8(_REGISTER_CONTROL)] if value not in _GAINS: raise ValueError("gain must be 1, 4, 16 or 60") return self._register8(_REGISTER_CONTROL, _GAINS.index(value)) def _valid(self): return bool(self._register8(_REGISTER_STATUS) & 0x01) def read(self, raw=False): was_active = self.active() self.active(True) while not self._valid(): time.sleep_ms(int(self._integration_time + 0.9)) data = tuple(self._register16(register) for register in ( _REGISTER_RDATA, _REGISTER_GDATA, _REGISTER_BDATA, _REGISTER_CDATA, )) self.active(was_active) if raw: return data return self._temperature_and_lux(data) def _temperature_and_lux(self, data): r, g, b, c = data x = -0.14282 * r + 1.54924 * g + -0.95641 * b y = -0.32466 * r + 1.57837 * g + -0.73191 * b z = -0.68202 * r + 0.77073 * g + 0.56332 * b d = x + y + z n = (x / d - 0.3320) / (0.1858 - y / d) cct = 449.0 * n**3 + 3525.0 * n**2 + 6823.3 * n + 5520.33 return cct, y def threshold(self, cycles=None, min_value=None, max_value=None): if cycles is None and min_value is None and max_value is None: min_value = self._register16(_REGISTER_AILT) max_value = self._register16(_REGISTER_AILT) if self._register8(_REGISTER_ENABLE) & _ENABLE_AIEN: cycles = _CYCLES[self._register8(_REGISTER_APERS) & 0x0f] else: cycles = -1 return cycles, min_value, max_value if min_value is not None: self._register16(_REGISTER_AILT, min_value) if max_value is not None: self._register16(_REGISTER_AIHT, max_value) if cycles is not None: enable = self._register8(_REGISTER_ENABLE) if cycles == -1: self._register8(_REGISTER_ENABLE, enable & ~(_ENABLE_AIEN)) else: self._register8(_REGISTER_ENABLE, enable | _ENABLE_AIEN) if cycles not in _CYCLES: raise ValueError("invalid persistence cycles") self._register8(_REGISTER_APERS, _CYCLES.index(cycles)) def interrupt(self, value=None): if value is None: return bool(self._register8(_REGISTER_STATUS) & _ENABLE_AIEN) if value: raise ValueError("interrupt can only be cleared") self.i2c.writeto(self.address, b'\xe6') def html_rgb(data): r, g, b, c = data red = pow((int((r/c) * 256) / 255), 2.5) * 255 green = pow((int((g/c) * 256) / 255), 2.5) * 255 blue = pow((int((b/c) * 256) / 255), 2.5) * 255 return red, green, blue def html_hex(data): r, g, b = html_rgb(data) return "{0:02x}{1:02x}{2:02x}".format(int(r), int(g), int(b))Here's the link...https://github.com/adafruit/micropython-adafruit-tcs34725/blob/master/tcs34725.py
Thanks!
-
I understand that and get this error when I flash it, but I would also like it to link in Atom so I can build and run it right away without having to flash it.
-
Hi @Burgeh
You need to place the
tcs34725.pyin a folder calledlib